Fare jogging con un robot
Vedi il Robotics_Jogging.project progetto di esempio nella directory di installazione di CODESYS sotto ..\CODESYS SoftMotion\Examples.
Questo esempio mostra come muovere un gruppo di assi in jog con il SMC_GroupJog2 POU.
Si consiglia di installare il CODESYS Depictor per questo esempio (è sufficiente la versione demo gratuita). In alternativa, puoi anche rimuovere le parti di codice corrispondenti dall'esempio per utilizzare l'esempio senza Depictor.
Applicazione
Per dimostrare il caso più generale possibile, l'esempio ha le seguenti funzioni:
Utilizzo di un robot con singolarità (robot articolato a 6 assi). L'esempio mostra che è possibile spostare il robot attraverso le singolarità in ACS e quindi continuare a fare jogging in modo cartesiano in una configurazione diversa.
Spostamento e rotazione del sistema di coordinate macchina (MCS) del robot rispetto al sistema di coordinate mondiali (WCS). In questo modo, puoi vedere come è diverso il jogging in MCS e WCS.
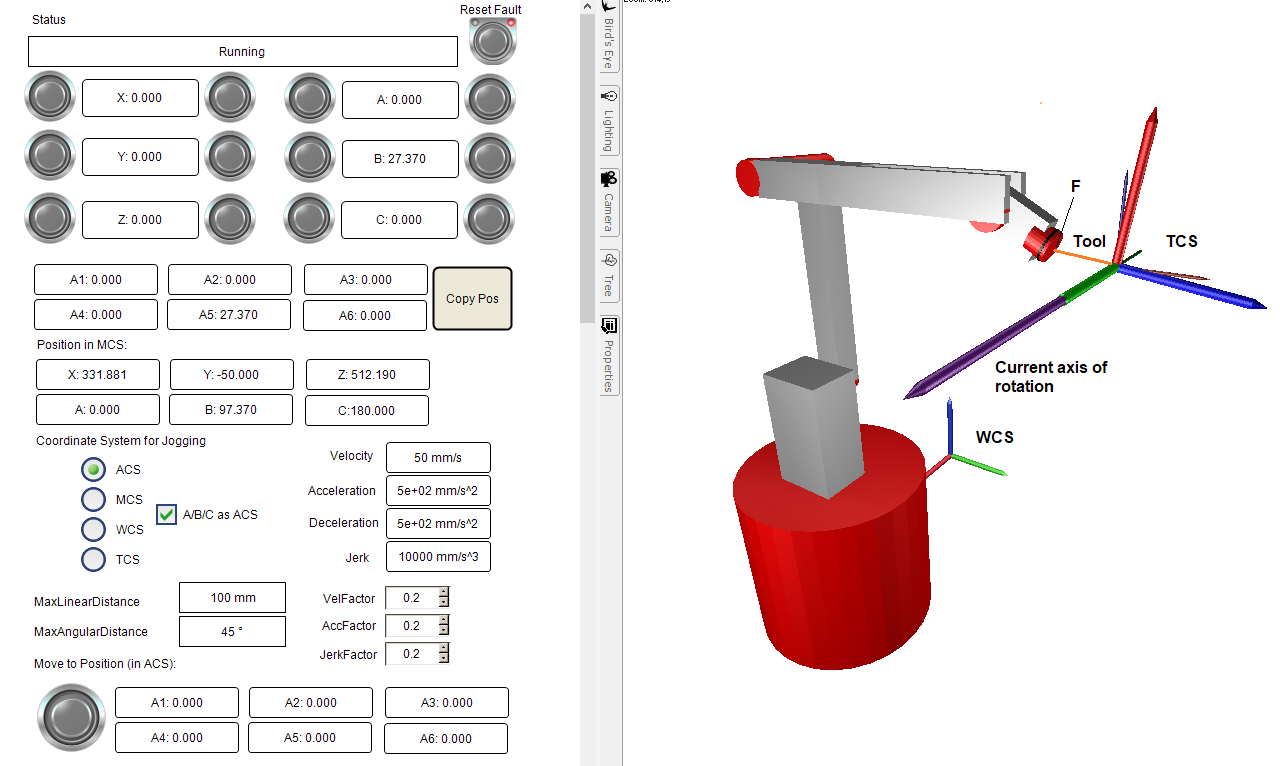
Configurazione di un utensile spostato e ruotato rispetto alla flangia (F). Nella figura sottostante è possibile vedere l'utensile e lo spostamento e la rotazione del TCS rispetto alla flangia (F).
Un asse aggiuntivo lineare
Add0e un asse rotativo aggiuntivoAdd1.
Struttura dell'applicazione
Programma principale
Il programma principale
PLC_PRGconsiste in una macchina a stati, cheAttiva il gruppo di assi (stato 0)
Configura lo strumento (stato 5)
Configura l'MCS (stato 6)
Inizia il jogging (stato 10)
Nello stato 20, vengono gestiti gli errori di jogging e vengono accettati i comandi di movimento (Sposta in posizione passare alla visualizzazione).
Gli altri stati vengono utilizzati per eseguire il movimento (60, 70) e per gestire e riconoscere gli errori (900, 1000).
Secondo la macchina statale, tutte le POU di robotica e
GroupJog2i programmi vengono chiamati ciclicamente e alcuni calcoli vengono eseguiti per la visualizzazione 3D in Depictor.
Programma GroupJog2
Questo programma contiene una macchina a stati con i seguenti passaggi:
Nello stato 10 vengono impostati gli ingressi di SMC_GroupJog2 e viene letta la configurazione degli assi del robot (SMC_GroupReadActualPosition). Questa configurazione viene eseguita nello stato 20 nel gruppo di assi (SMC_SetKinConfiguration).
Nello stato 30, il sistema reagisce agli errori durante il jogging, nonché alle modifiche alle impostazioni del jogging (ad esempio, a un sistema di coordinate modificato). In caso di modifica, il sistema torna allo stato 10.
Lo stato 50 viene inserito su un fronte di discesa dell'ingresso di abilitazione. Il jogging viene interrotto da MC_GroupHalt.
La messa in produzione
Compila e avvia il programma creato. È possibile utilizzare la visualizzazione per eseguire il robot. È possibile definire tutte le impostazioni rilevanti per il jogging (ad esempio, in quale sistema di coordinate viene eseguito il jogging ea quale velocità).
Se hai installato il CODESYS Depictor, quindi si consiglia di posizionare la finestra con il Depictor (Scene POU) accanto alla finestra di visualizzazione.
Il Depictor rappresenta il TCS (Tool Coordinate System) nella parte anteriore del robot. Inoltre, l'asse di rotazione corrente del TCS viene visualizzato in viola. Questo è utile per verificare i diversi tipi di cambio di orientamento (ad esempio, testare il ABC_come_ACS opzione e il TCS sistema di coordinate).